Node-RED è uno strumento di programmazione per collegare insieme dispositivi hardware, API e servizi online. Fornisce un editor basato su browser che semplifica il collegamento dei flussi utilizzando l’ampia gamma di nodi che può essere distribuita al runtime con un solo clic.
I nodi sono la parte fondamentale di Node-RED, iniziamo con i due che si usano più di tutti, l’iniect e il debug
questi due nodi servono a provare il codice l’iniect attraverso il timestamp ovvero i secondi della macchina in cui è installato e il debug che permette di visualizzare il risultato dei nodi precedenti nella barra di sinistra. L’iniect in particolare può anche impostare un uscita temporizzata che può comandare i nodi successivi.
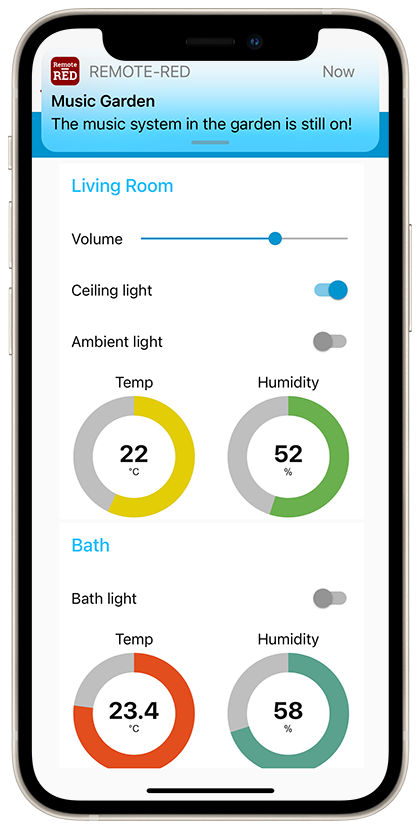
Con Remote-RED puoi accedere alla dashboard di Node-RED direttamente dal cellulare anche se non sei a casa. Puoi anche farti inviare notifiche da Node-RED. Le notifiche possono avere anche azioni a cui puoi rispondere direttamente.
Purtroppo su Dietpi non funziona perchè Remote-REDcomunica con il server attraverso SSH Client, Dietpi per default non ha nessun SSH Client. installarlo è semplice, basta aprire il software di dietpi con questo comando:
Per poter sviluppare progetti con raspberry e con Node red, possiamo utilizzare una macchina virtuale con VirtualBox. oggi vi spiego come installare Dietpi e Node red su virtual box. Utilizzare una macchina virtuale per sviluppare il tutto è ottimo per poter testare i nostri programmi.
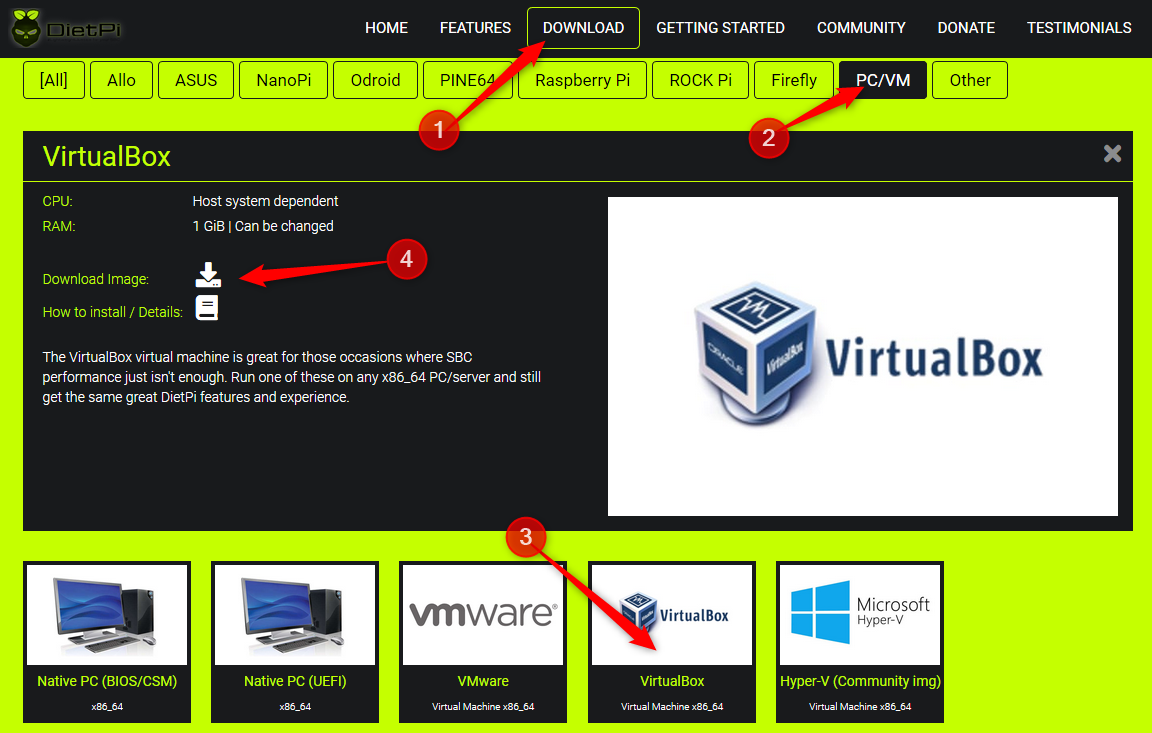
Sul sito Oracle VM VirtualBox possiamo scaricare l’ultima versione per il nostro sistema operativo.
Quando lo abbiamo installato possiamo scaricare l’immagine del sistema operativo Dietpi.
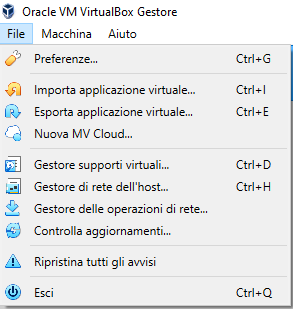
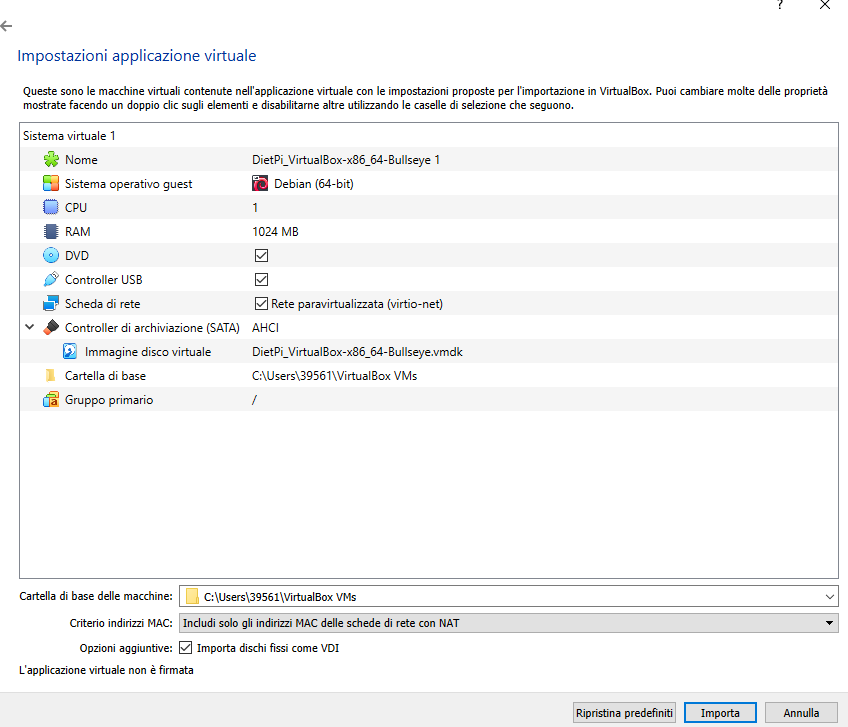
Una volta scaricato il SO, lo scompattiamo e importiamo l’applicazione virtuale
Lasciamo tutto invariato e clicchiamo su Importa, ci ritroveremo con una riga così:
Ora se avviamo il SO avremo un errore perchè non abbiamo installato l’Extension Pack lo scarichiamo da qui
Cliccandoci semplicemente sopra lo possiamo installare:
Accettiamo e si installa l’extension pack. Ora possiamo riavviare e aspettare che finisce di riavviarsi il sistema operativo.
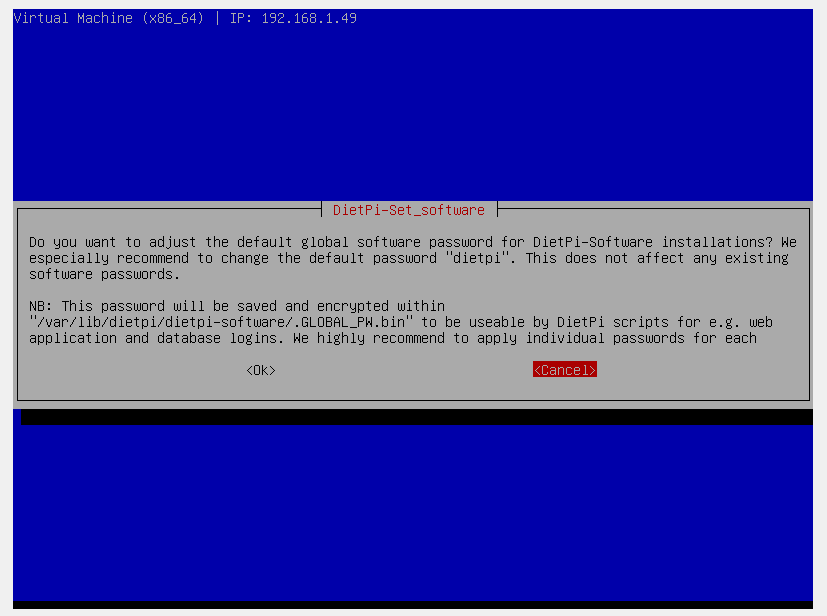
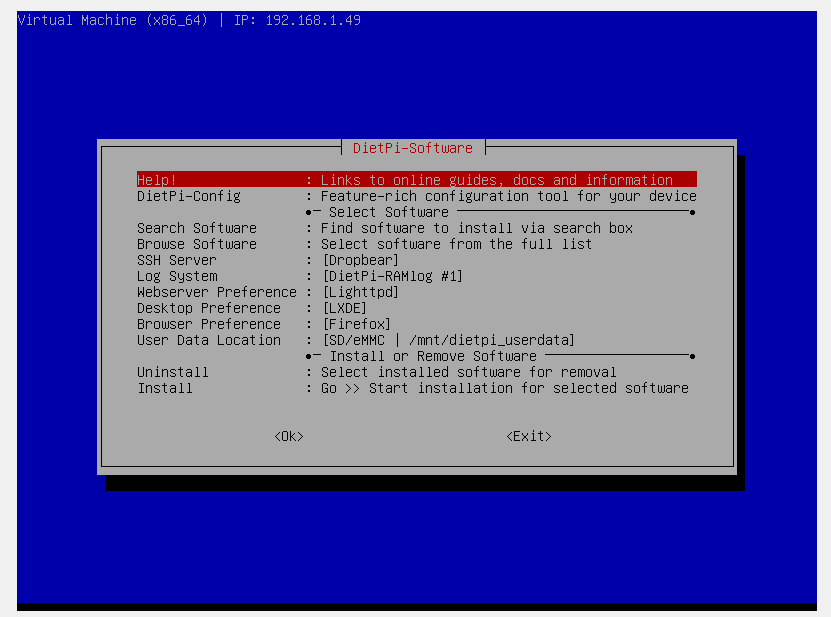
quando si presenta questa schermata premere cancel per non cambiare la password di default. ora possiamo installare NodeRed, sul terminale digitiamo:
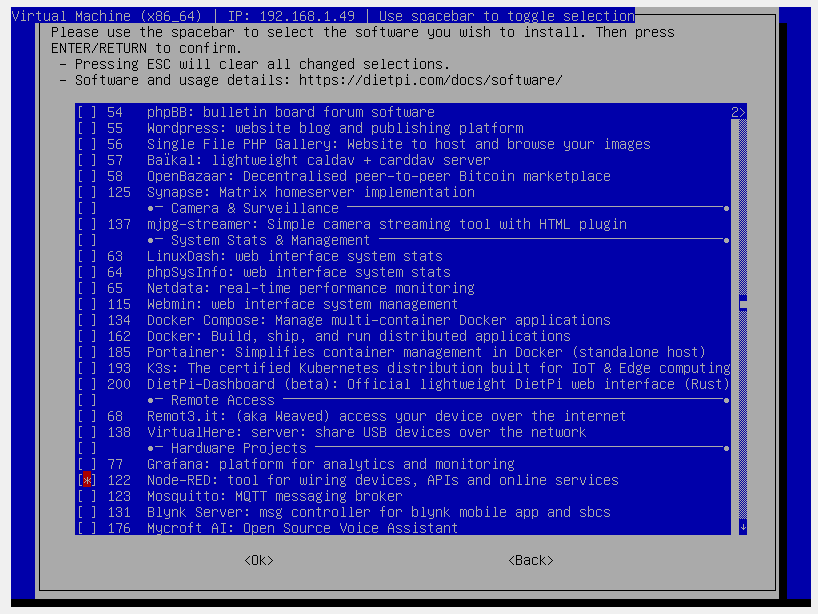
ora possiamo selezionare Ok e Install nella schermata precedente. quando ha finito di installare possiamo riavviare il sistema e controllare l’indirizzo IP:
digitiamo indirizzoIP:1880 sul browser del PC come ad esempio questo:
Oggi parliamo di Node-RED,il sito ufficiale é: www.nodered.org/ ed è un potente strumento per la creazione di applicazioni Internet of Things (IoT) con l’obiettivo di semplificare il “collegamento” dei blocchi di codice per eseguire le attività. Utilizza un approccio di programmazione visuale che consente agli sviluppatori di collegare blocchi di codice predefiniti, noti come “nodi”, insieme per eseguire un’attività. I nodi collegati, solitamente con una combinazione di nodi di input, nodi di elaborazione e nodi di output, quando cablati insieme, costituiscono un “flusso”.
Originariamente sviluppato come progetto open source presso IBM alla fine del 2013, per soddisfare la necessità di collegare rapidamente hardware e dispositivi a servizi Web e altri software – come una sorta di colla per l’IoT – si è rapidamente evoluto fino a diventare una programmazione IoT per scopi generali attrezzo. È importante sottolineare che Node-RED ha rapidamente sviluppato una base di utenti significativa e in crescita e una comunità di sviluppatori attivi che stanno contribuendo con nuovi nodi che consentono ai programmatori di riutilizzare il codice Node-RED per un’ampia varietà di attività.
Sebbene Node-RED fosse originariamente progettato per funzionare con l’Internet of Things, ovvero dispositivi che interagiscono e controllano il mondo reale, man mano che si è evoluto, è diventato utile per una vasta gamma di applicazioni.
Installare e aggiornare Node-RED
il sito di Node-RED ha già scritto uno script per installare automaticamente Node-RED su Raspberry. Questo script lo aggiorna anche quando è già installato.
Basta copiare il codice aprire un terminale su Raspberry e copiarci dentro questa stringa:
Per funzionare hai bisogno di curl, se non è installato su raspberry perché ad esempio hai installato dietpi possiamo installarlo attraverso il terminale con questo codice:
DietPi è estremamente leggero, le dimensioni del sistema operativo sono solo di 400 MB (3x più leggera di Raspbian Lite). DietPi consente di ottenere le prestazioni massime dal tuo dispositivo.